I. სისტემის მიმოხილვა
1. პროექტის ისტორია
ბოლო წლებში სატვირთო მანქანების უკანონო გადაზიდვა სერიოზულ პრობლემად იქცა, რაც საფრთხეს უქმნის ქვეყნის მასშტაბით საგზაო მოძრაობის უსაფრთხოებას. ეს გადატვირთავს მაგისტრალებსა და ხიდებს, მნიშვნელოვნად ამცირებს გზებისა და ხიდების ექსპლუატაციის ვადას; ამავდროულად, მნიშვნელოვნად მცირდება სატრანსპორტო საშუალებების უსაფრთხოების ფაქტორი, რაც მუდმივად იწვევს საგზაო შემთხვევებს; ასევე ადვილად იწვევს საცობებს და გარემოს დაბინძურებას.
ქვეყნის მასშტაბით ყველა დონის მთავრობებმა განუწყვეტლივ გაზარდეს ძალისხმევა საავტომობილო გზებით გადატვირთული სატრანსპორტო საშუალებების კონტროლის მიზნით და მიაღწიეს მნიშვნელოვან ეტაპობრივ შედეგებს. თუმცა, რთული სოციალური და ეკონომიკური ფაქტორების გამო, ეროვნული გადატვირთვის გამოვლენის მდგომარეობა კვლავ ძალიან სერიოზულია და გადატვირთვის ფარული საფრთხეები არ არის აღმოფხვრილი; მმართველობის შედეგების კონსოლიდაცია და გადატვირთვის გამოვლენის სამუშაოების მუდმივი ხელშეწყობა კვლავ დიდი ზეწოლის ქვეშაა. ამიტომ, გადატვირთული სატრანსპორტო საშუალებების მართვა გრძელვადიანი და ყოველდღიური სამუშაოა, რომელიც უნდა გაგრძელდეს. უმნიშვნელოვანესია გადატვირთული სამუშაოს მართვის ინტეგრირება გრძელვადიან მექანიზმში. ის ასევე ასრულებს გადატვირთული სატრანსპორტო საშუალებების სამართლებრივ შემაკავებელ როლს და ასევე შეუძლია გააფართოვოს თავისი ფუნქციები, რათა ის გახდეს საგზაო შემოწმება, უკანონო სატრანსპორტო ოპერაციების შემთხვევითი მენტალიტეტის წინააღმდეგ ბრძოლა და დროულად გააკონტროლოს და აღმოფხვრას სხვადასხვა უკანონო სატრანსპორტო ოპერაციები, მათ შორის გადატვირთული ტრანსპორტი.
2. შესავალი აწონვის სისტემაში
სტატიკური სატვირთო სასწორის აწონვის პრინციპია ყველა სატრანსპორტო საშუალების აწონვის პლატფორმაზე განთავსება მთლიანი სატრანსპორტო საშუალების ასაწონად. მას აქვს მაღალი აწონვის სიზუსტე და მკაფიო ეროვნული სტანდარტები. თუმცა, ჩვეულებრივი სატვირთო სასწორით მხოლოდ მთლიანი სატრანსპორტო საშუალების წონაა შესაძლებელი, მაგრამ არა ღერძის წონის. მას შეუძლია განსაზღვროს, გადატვირთულია თუ არა მთლიანი სატრანსპორტო საშუალება, მაგრამ არ შეუძლია განსაზღვროს, გადატვირთულია თუ არა ღერძის წონა. მას არ შეუძლია დააკმაყოფილოს საგზაო ადმინისტრაციის დეპარტამენტის მოთხოვნები გადატვირთული ტრანსპორტის მართვის მიზნის მისაღწევად.
ეს გეგმა აერთიანებს ჩვენი კომპანიის მრავალწლიან გამოცდილებას გადატვირთვის აღმომჩენი მოწყობილობების დიზაინსა და წარმოებაში და მის რეალურ გამოყენებას ქვეყნის სხვადასხვა რეგიონში, ყურადღებით სწავლობს ბაზარზე არსებული გადატვირთვის აღმომჩენი სხვადასხვა მოწყობილობების გამოყენებას და ყოვლისმომცველად ითვალისწინებს საავტომობილო გზების მართვის დეპარტამენტების სპეციფიკურ საჭიროებებს გადატვირთული ტრანსპორტის მართვისთვის. იგი იყენებს მოწინავე ტექნოლოგიებს და უნიკალურ დიზაინის იდეებს დინამიური, მაღალი სიზუსტის ავტომობილის წონისა და ღერძის ტიპის აღმოჩენის სისტემის შესაქმნელად. მას შეუძლია როგორც ღერძის წონის, ასევე მთლიანი წონის აწონვა და ღერძის ტიპის გარჩევა. ასევე, მნიშვნელოვნად შეიძლება გაუმჯობესდეს ღერძის წონის სიზუსტე.
2. გადატვირთვისა და ლიმიტირების სისტემის შემადგენლობა
1. სისტემის მახასიათებლები
მას შეუძლია აწონოს დაბალი სიჩქარით მოძრავი სატრანსპორტო საშუალებები და ავტომატურად განსაზღვროს, გადატვირთულია თუ არა სატრანსპორტო საშუალების წონა ან ღერძის წონა;
მას შეუძლია აღმოაჩინოს ღერძების რაოდენობა, ღერძების ჯგუფი, ღერძის წონა და ავტომობილის წონა;
მას შეუძლია შექმნას სრული ინფორმაცია ავტომობილის აწონვის შესახებ, მათ შორის ღერძის ტიპი, ღერძის წონა, ღერძის ჯგუფი და საერთო წონა;
მას შეუძლია აწონვის ინფორმაციის კომპიუტერზე გადაცემა მონაცემთა ინტერფეისის საშუალებით;
სისტემის ძირითადი ნაწილი იყენებს მოძველებულ და საიმედო აღჭურვილობას, რომელთაგან თითოეული მოდულური დიზაინისაა, მარტივი მოვლა-პატრონობა და გაფართოება, რაც უზრუნველყოფს სისტემის მაღალ საიმედოობას.
სისტემური პროგრამული უზრუნველყოფა არის მოწიფული, მაღალი საიმედოობით, მონაცემები სრული და ეფექტურია და შესაძლებელია მისი სრულად გაზიარება, რაც ეფექტურად აუმჯობესებს სამუშაო ეფექტურობას და მაქსიმალურად აღმოფხვრის სხვადასხვა მენეჯმენტის ხარვეზებს.
2. სისტემური პროცესი
სატვირთო მანქანა შეჰყავთ გადატვირთვის სადგურის აწონვის ზოლში და სანომრე ნიშნის ამოცნობის სისტემა ადგენს მის სანომრე ნიშნის ნომერს;
საბურავის (ღერძის) იდენტიფიკატორი განასხვავებს ღერძების რაოდენობას და ავტომობილის აწონვის სისტემა იწყებს აწონვას, ღერძის ჯგუფის განსაზღვრას და ღერძის წონის გამოთვლას.
როდესაც ყველა სატრანსპორტო საშუალება გაივლის სატრანსპორტო საშუალებების გამყოფს და შევა აწონვის პლატფორმაზე და სასწორი შედარებით დაბალანსებულ მდგომარეობაშია, აღირიცხება სატრანსპორტო საშუალების საერთო წონა და მიიღება ღერძის წონა.
აწონვის სისტემა აგზავნის აწონვის ინფორმაციას (სანომრე ნიშნის ნომერი, ღერძების რაოდენობა, ღერძის წონა, ავტომობილის საერთო წონა და ა.შ.) დეტექციის კომპიუტერს. კომპიუტერი ადგენს, არის თუ არა ის გადაჭარბებული და ეკრანზე აჩვენებს დეტექციის ინფორმაციას, როგორიცაა ავტომობილის წონა, გადაჭარბებული მაჩვენებელი და გადაჭარბების მაჩვენებელი.
მას შემდეგ, რაც სატრანსპორტო საშუალება დაასრულებს შესაბამის ოპერაციებს, ავტომობილის გიდის პერსონალი უშვებს არა-შეზღუდულ სატრანსპორტო საშუალებებს აღმოჩენის ზონის დასატოვებლად ეკრანზე მოცემული ინფორმაციის შესაბამისად, აგზავნის ზედმეტად შეზღუდულ სატრანსპორტო საშუალებებს სადგურის ტერიტორიაზე დასამუშავებლად, ბეჭდავს ზედმეტად შეზღუდული სატრანსპორტო საშუალების შემოწმების ფორმას და ასრულებს შესაბამის დამუხტვის ოპერაციებს;
3. სისტემის შემადგენლობა და განლაგების გეგმა
3.1 სისტემის შემადგენლობა
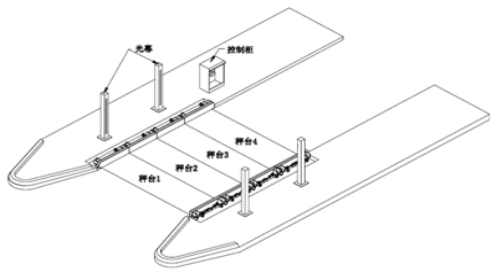
გადატვირთვისა და ლიმიტის გადატვირთვის სისტემა შედგება ZDG ოთხმაგიდიანი დინამიური ღერძიანი სასწორისგან, მართვის ინსტრუმენტისგან, ინფრაწითელი სატრანსპორტო საშუალების გამყოფისგან, სასწორი პლატფორმის ბორბლის ღერძის იდენტიფიკატორისგან, მართვის კარადისგან (დამატებითი აღჭურვილობა: სანომრე ნიშნის ამოცნობის სისტემა, LED დიდი ეკრანის დისპლეის სისტემა, ხმოვანი შეტყობინებების სისტემა, სატრანსპორტო საშუალების მართვის სისტემა, სამრეწველო კომპიუტერი, ბილეთების პრინტერი, UPS უწყვეტი დენის წყარო, გადატვირთვისა და ლიმიტის გადატვირთვის აღმოჩენის სისტემის პროგრამული უზრუნველყოფა, მონიტორინგის სისტემა) და სხვა აქსესუარებისა და კაბელებისგან.
3.2 სისტემის განლაგების დიაგრამა, როგორც ნაჩვენებია:
სამუშაო პროცესი:
1) მანქანები ზოლში თანმიმდევრობით შედიან უსაფრთხო მანძილის დაცვით, რაც ააქტიურებს ინფრაწითელ სატრანსპორტო საშუალებების გამყოფს;
2) სატრანსპორტო საშუალების თითოეული ღერძი გადის მრავალსართულიან აწონვის პლატფორმაზე;
3) დისპლეის კონტროლერი ამუშავებს აწონვის პლატფორმის სენსორიდან მიღებულ აწონვის სიგნალს და ბორბლის სენსორის სიგნალს, ლოგიკური პირობების მიხედვით გამოყოფს ღერძს და ეფექტურად უმკლავდება განსაკუთრებულ სიტუაციებს;
4) სატრანსპორტო საშუალების უკანა მხარე გამოდის მრავალსართულიანი აწონვის პლატფორმიდან და ინფრაწითელი სატრანსპორტო საშუალების გამყოფიდან;
5) დისპლეის კონტროლერი ყოვლისმომცველად აფასებს ავტომობილის დასრულების სიგნალს ინფრაწითელი ავტომობილის გამყოფის მიერ აღმოჩენილი ოკლუზიის სიგნალისა და აწონვის სენსორის მიერ მიღებული აწონვის სიგნალის საფუძველზე;
6) დისპლეის კონტროლერი ამუშავებს ზემოთ აღნიშნული სატრანსპორტო საშუალების აწონვის პლატფორმაზე გავლისას მიღებულ აწონვის სიგნალს;
7) ეკრანის კონტროლერი ქმნის მთელი ავტომობილის სრულ აწონვის ინფორმაციას და სრული აწონვის ინფორმაცია მოიცავს ავტომობილის სიჩქარეს, ღერძის ტიპს, ღერძის წონას, ღერძის ჯგუფის წონას, საერთო წონას და ა.შ.;
8) დაასრულეთ ერთი ავტომობილის აწონვის პროცესი და დაელოდეთ შემდეგი ავტომობილის აწონვას
9) მთელი სამუშაო პროცესის განმავლობაში, სისტემა ავტომატურად ამუშავებს სხვადასხვა განსაკუთრებულ სიტუაციებს, როგორიცაა სრული შესვლა და სრული გასვლა, განმეორებითი შესვლა და გასვლა და აწონვის პლატფორმაზე ხანგრძლივი დარჩენა;
სისტემას შეუძლია ავტომატურად და ეფექტურად გაუმკლავდეს შემდეგ სატრანსპორტო საშუალებებთან დაკავშირებულ სიტუაციას და შემდგომი სატრანსპორტო საშუალების აწონვა გავლენას არ ახდენს მონაცემთა სიზუსტეზე.

გამოქვეყნების დრო: 2025 წლის 20 თებერვალი